Servo control by push button switch arduino
In this project, the movement of the servo shaft in the clockwise and anticlockwise direction is controlled by two pushbuttons using Arduino; refer: How to use a servo with Arduino.
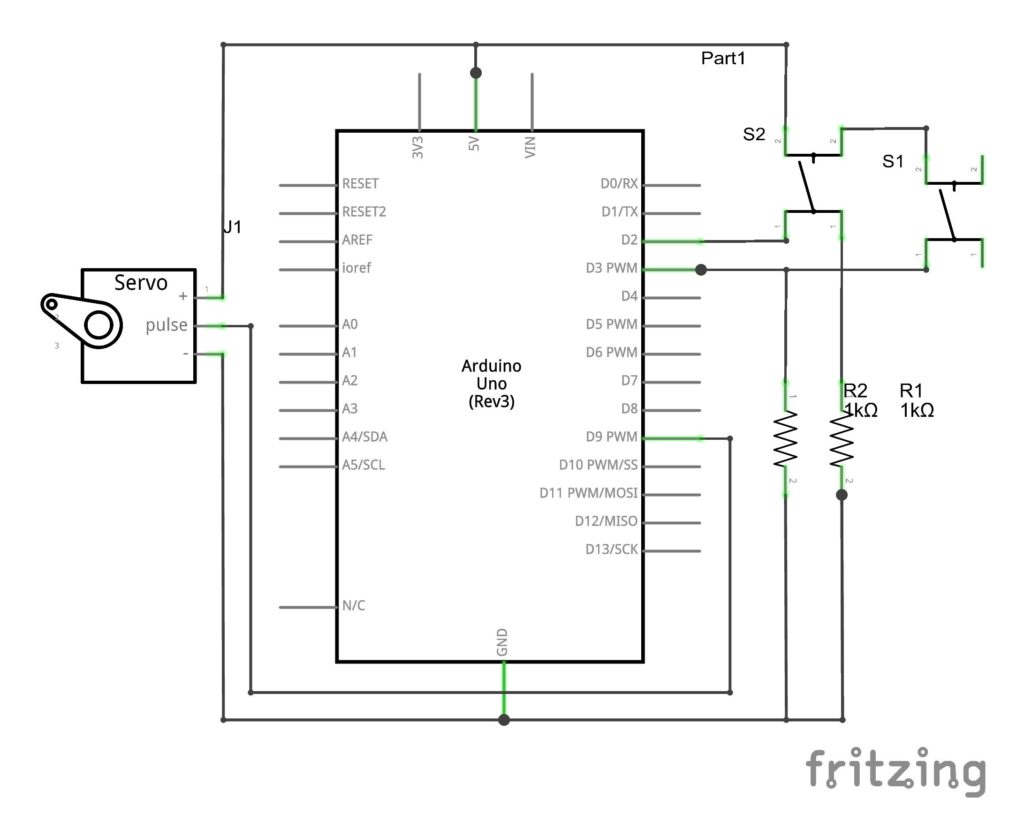
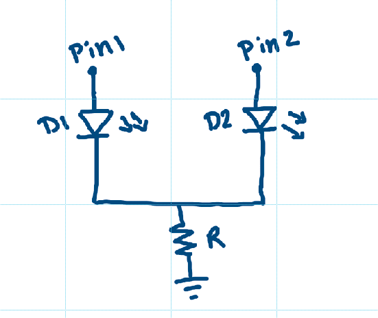
In the circuit, the positive supply from the +5V output is connected to one terminal side of the SPST push switch. The other terminal side is connected to the digital pin 2 and pin 3 of the Arduino board with pulldown resistors of 1KΩ (connected across the input pins and the GND terminal). So whenever the switches are pressed the digital pins get an active high state input.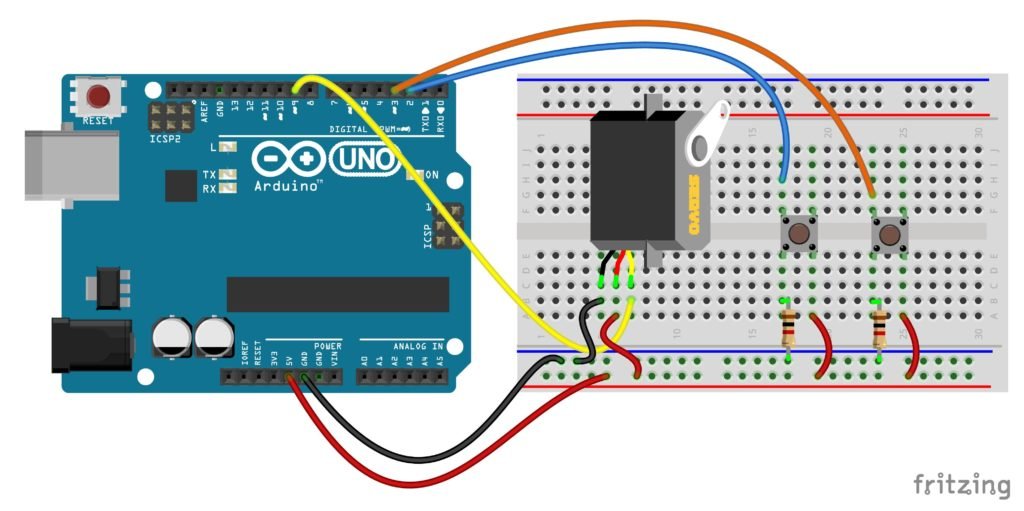
If the first switch is pressed the pin 2 will have an active high state, then the position of the servo starts to increments as long as the switch is held ON until it reaches a value of 180 degrees. Similarly, the servo keeps decrement to 0 degrees if the second switch is pressed.
The speed of the servo can be controlled by adjusting the time delay function; In the delay() function, the time delay is given in milliseconds. The speed of rotation is inversely proportional to the time delay value.
 Here the servo moves only when the input is in an active high. Whenever the push button is released, the arm movement stops at the current position. And when the switch is pressed again the movement continues from the same position. If the servo is either incrementing or decrementing, the push button currently pressed has to be released in order to read the state of the other switch.
Here the servo moves only when the input is in an active high. Whenever the push button is released, the arm movement stops at the current position. And when the switch is pressed again the movement continues from the same position. If the servo is either incrementing or decrementing, the push button currently pressed has to be released in order to read the state of the other switch.
Code
#include<Servo.h> int pos = 0; Servo servo; void setup() { pinMode(2, INPUT); pinMode(3, INPUT); servo.attach(9); } void loop() { while (digitalRead(2) == HIGH && pos < 180) { pos++; servo.write(pos); delay(15); } while (digitalRead(3) == HIGH && pos > 0) { pos--; servo.write(pos); delay(15); } }

Hi I have a question I would like to use 1 button push it once to move the servo from 0 to 180 and keep going until I then push it again to stop it. Can this be done??
Pat
Refer: Arduino Toggle Switch
The code in the above project can be used to run a code block by an alternate push on a single switch. Inside it, you can add the code for 0 to 180 or 180 to 0 degree movements.
Is it possible to control this program for three servo in the same uno board
Yes, Refer : Multiple servo attachments.
No I want to control 3 servo with 6 push button
Yes, you can. Connect multiple servos by declaring them individually. And then add condition function for each push switch.
I got an issue. The hole thing work but if im click the right button in he goes to right but if i click nothing the servo goes automatically trough the left.
Can you help me
Probably it might due to loss contact or wrong connection. Make sure the pull down resistors and wires are connected properly.
Can you make the servo go faster. And what do i have to change in my code for that
Change the value of delay in the code.
Refer servo motor speed control.
what is the resistors’ function in it? Is it possible to make it work without them?
It is a pull-down resistor, to hold logic low level when there is no input. It avoids a floating input and prevents an undefined input state.
Hi guys. really needs help. I try to make one project which can sweep the servo motor from 0 to 180 degree and back to 0 degree once triggered by one push button. Do anyone had the example of the circuit construction and the coding? Thanks in advance.
Try this code,
if (digitalRead(Switch) == HIGH) { //sweep from 0 to 180 degree for (pos = 0; pos <= 180; pos += 1) { myservo.write(pos); delay(15); } //sweep from 180 to 0 degree for (pos = 180; pos >= 0; pos -= 1) { myservo.write(pos); delay(15); } }Refer Servo motor sweep code
is there a way to go from 90 to 180 with one button and 90 to 0 with another??? if so please respond soon
Use this code,
while (digitalRead(2) == HIGH && pos < 180) { servo.write(90); pos++; servo.write(pos); delay(15); } while (digitalRead(3) == HIGH && pos > 0) { servo.write(90); pos--; servo.write(pos); delay(15); }Here whenever you press the button the servo first comes to 90 degrees position, then only it can increments or decrements.
New question, which resistor is it i couldn’t make out the numbers
1KΩ, commonly a value of 1-10 kΩ can be used.
thanks
Im not going to copy you but thank you a ton this will be great as something too look off of and be useful as a advice kinda thing.
sorry if i’m asking too much questions but what is a pot pin, pot value and motor pin and motor value, i assume its a pin of the potentiometer and motor
Your code is to control the speed of a motor using a potentiometer. So these variables (pot pin, pot value and motor pin and motor value) are required to connect potentiometer and motor to the arduino and read and write the values respectively. Here, the pot pin is the analog pin A0 which connects to the potentiometer terminal C. And pot value is the analog value read by the input A0, which is a decimal value ranging 0 to 1023 for the corresponding input voltage range of 0-5V.
The motor pin is the pin number which attaches the motor and motor value is the value to vary the motor speed using PWM. Here code the motor value is just the mapped value of pot value from 0-1023 to 0-255.
thanks that was needed alot (you are helping me alot for understanding code thank you)
hi, admin, i need your help,
i am using a continuous servo motor with one push button, for this if i press push button, i need 360 rotation (1 circular rotation) of the servo motor and then stop. so i need code for it as well connections also …thank you.
Unlike from Position rotation servo motors, continuous rotation servos rotates clockwise and anti-clockwise with a speed control.
Its direction and speed are controlled by the pulse width signals between 1000us and 2000us. When the value increases from 1000us to 1500us the clockwise speed decreases and the motor stops at 1500us and on after 1500us the motor speed increases in counterclockwise direction till it reaches maximum speed at 2000us.
1000microseconds – motor rotates clockwise at maximum speed.
1500 microseconds – motor stops.
2000microseconds – motor rotates counterclockwise at maximum speed.
Set the delay value by measuring the time required to complete 1 rotation for the given speed.
#include<Servo.h> int time_delay = 1000 ; // Set time delay value. Servo servo; void setup() { pinMode(2, INPUT); servo.attach(9); } void loop() { if (digitalRead(2) == HIGH) { servo.writeMicroseconds(1000); // rotates clockwise at full speed delay(time_delay); servo.writeMicroseconds(1500); // rotation stops } }Just ignore the arrangement for Input at pin3, except the connection is same as in the post.
thank you, but
the problem with speed ,the motor is rotating continuously not stoping and initially with out pressing push button the motor is rotating continuously , but i need when we prees the push button that time should start the servo motor and 2 rotations of the motor shaft and then stop the motor automatically….thank you i am waiting for the code…
AND one more situation if pushbutton press continuously the motor is also rotating continuously for this i need some delay after pressing the push button.
Refer the code for a toggle switch. In a toggle switch code, the input is a positive edge, so the code runs only for the push after a release.
The problem may be related to the connection, make sure the input has a proper connection with a pull-down resistor.
hi how would i write a default position in to the code so that when a button is released the servo goes back to a set degree like 90.
You can’t use a continuous servo for such angular degree movements. It can only do by controlling the speed and the time of movement from a particular position.
hi not for continuous servo, its for the standard 0 to 180. 🙂
Outside the while loop add
hi can you use this code to control multiple servos at once.
Refer the code for multiple servo attachments.
eg:-
while (digitalRead(2) == HIGH && pos < 180) { pos++; servo1.write(pos); servo2.write(pos); delay(15); }hi thats ace thank you, what about if i wanted to add more buttons to control different servo ?
Add another loop with another input pin number (2,3,4..), servo write variable (pos1,pos2,..) etc.
For controlling all the servos simultaneously, use an if condition instead of while loop.
Thank you for your help.
Ultrasonic sensor with continuous servomotor for Arduino I need code with connections where to give but I need 2sec motor rotate and then stop
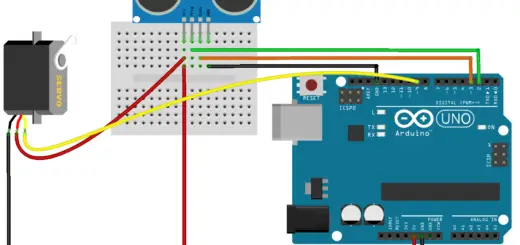
Refer : Ultrasonic sensor with servo motor.
For 2 second rotation use this code,
sir, i need full code i am new to Arduino please.
For an ultrasonic scanner with servo, what type of motion you need? Does it should rotate with a code only or controlled by a push button.
i am not using push button, i am using the ultrasonic sensor with the continuous servo motor in Arduino, i need only one direction rotation with some (time 2 or 3 seconds) time and then stop .please sir i need code and connections. here input is the ultrasonic sensor.
For connection and ultrasonic sensor mounting, refer the link of “object scanner with Ultrasonic Servo rover“.
Try this,
Replace the code inside the void loop of Ultrasonic servo rover with the below code.
for (int i = 0; i <= 100; i++) { // rotates clockwise at full speed servo.writeMicroseconds(1000); delay(20); // rotation stops servo.writeMicroseconds(1500); // Serial print Ultrasonic sensor value Serial.println(radar()); }hi i’m hoping you can help again, I’ve modified a bit of code so that a continuous servo can rotate and the return but, i’m struggling to be able to flip it so it does the opposite ( ie wanting to control a single continuous servo, so that one button sends it one way and another button sends it the other way
if (digitalRead(2) == HIGH) {
servo1.writeMicroseconds(2000);
delay(time_delay);
servo1.writeMicroseconds(1500);
if (digitalRead(2) == LOW) {
servo1.writeMicroseconds(1000);
delay(time_delay2);
servo1.writeMicroseconds(1500);
can you help ????
Change the code,
// Button at input pin 2 if (digitalRead(2) == HIGH) { servo1.writeMicroseconds(2000); delay(time_delay); servo1.writeMicroseconds(1500); } // Button at input pin 3 if (digitalRead(3) == HIGH) { servo1.writeMicroseconds(1000); delay(time_delay2); servo1.writeMicroseconds(1500); }Check ‘}’ in the code.
thank you for all you help, you’re a legend.
this is my last question, SIR,
actually, i am developing sugar feeding system in my house, i am using screw conveyor 3d printing part .it will feed the sugar.in that i am using the ultrasonic sensor as the input signal when the signal is coming the continuous servo motor will start the rotating 2sec and then stop because giving the signal once i will get some quantity sugar. for this, i need the code. and thank you very much sir…
Try this. Here the servo operates when the object infront of the ultasonic sensor comes closer than the preset distance value.
#include<Servo.h> const int trig = 4, echo = 5 ; int Distance = 10; //Set preset distance value. Servo servo; void setup() { servo.attach(9); } void loop() { if (radar() < Distance) { // rotates clockwise at full speed servo.writeMicroseconds(1000); delay(20); // rotation stops servo.writeMicroseconds(1500); } } long radar(void) { digitalWrite(trig, HIGH); delayMicroseconds(15); digitalWrite(trig, LOW); long dur = pulseIn(echo, HIGH); dur = dur / 58; return dur; }Hello sir , i would like to control my servo , whereby the angld is controlled by potentiometer and the speed is controlled by pushbutton. Everytime the button is pushed , and after we release the button, when we play with potentiometer the speed will increase. My question is , for each speed , do i have to increase delay or decrease the delay? Because when i try increasing the delay, the speed increased
Actually, the value of delay between each servo values (increment or decrement) is inversely related to its speed. The speed increases with the decrease in delay. But in your case, you are controlling the servo position with a potentiometer, so in the code where you have added the delay..?
Can you share the Arduino code.
Good day. Whats the code for. 1 servo controlled by two switches.First switch is going to 90′ while the 2nd switch will return it to its original position.
To move the servo through each angular degree, then Just change the position increment limit in the code; pos < 180 to pos < 90. Or the servo needs to move only two angles use, if (digitalRead(2) == HIGH ) {
servo.write(90);
delay(15);
}
if (digitalRead(3) == HIGH ) {
servo.write(0);
delay(15);
}
good day sir.. just need some help.. whats the code for controlling a servo by a pushbutton manually. like 2 pushbutton. pb1 for left. and pb2 for right . then if i press pb1 it will move towards left but dont reach its maximum movement.. but only a microstep.. if i release it will stop. and only continue towards left if i press pb1 again.. then it will go towards right if anytime i press pb2 .. same as pb1
You mean to control servo movement right and left with a single step movement for each switch press.
Actually I need the same help…!
“You mean to control servo movement right and left with a single step movement for each switch press.”
Initialize all states as zero.
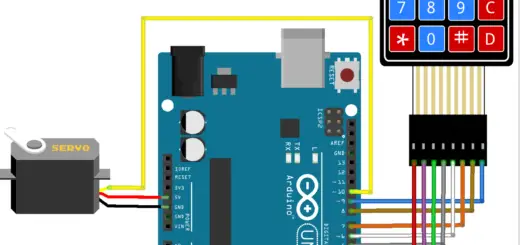
//Increments the servo step. if (statep1 == 0 && digitalRead(p1) == HIGH) { statep1 = 1; pos += 10; // +10 - change the value to adjust the step. myservo.write(pos); delay(15); } if (statep1 == 1 && digitalRead(p1) == LOW) { statep1 = 0; } //Decrements the servo step. if (statep2 == 0 && digitalRead(p2) == HIGH) { statep2 = 1; pos -= 10; // -10 - change the value to adjust the step. myservo.write(pos); delay(15); } if (statep2 == 1 && digitalRead(p2) == LOW) { statep2 = 0; }Sir I use three push buttons for controlling servomotor in 3 different angle how can I wrote this code please help me
you mean, to drive the servo position to just three angles while pushing the respective 3 switches.
Eg:- switch 1 -> 45°.
switch 2 -> 90°.
switch 2 -> 135°.
Hello Sir
your code is magnificent for use on my model railroad thank you for that ,but i have a question can i moddefy this code so when it reaches 0 degree a green led wil turn on en wen it reaches 90 degree a red led turns ond and how can i do that
kind regards from the netherlands
In this code, the Green LED ON when the servo position reaches 0 and the RED OFF. When 90 degree is reached the Green OFF and RED ON.
//Place inside the end of first while loop;incrementing loop. if (pos == 90) { digitalWrite(REDLED, HIGH); digitalWrite(GreenLED, LOW); } //Place inside the end of second while loop;decrementing loop. if (pos == 0) { digitalWrite(GreenLED, HIGH); digitalWrite(REDLED, LOW); }thank you very much
another question
on what pin i should put de led on that i can`t find in this code
thank you
You have to assign the variable REDLED and GreenLED with any of the digital pin numbers; the respective pin of arduino connected to the LEDs.
void setup() { // set the digital pin as output: pinMode(REDLED, OUTPUT); pinMode(GreenLED, OUTPUT); }Dear Sir
allready found the connection for the green and red led it works perfect
THANK YOU
Hello sir can you help me To make the code of TX of servo and Rx of servo it means use 2 push button as transmitter ( works as remote) and servo attached to the receiver portion of the prototype. This all system is made using Bluetooth HC-05.
Using a Bluetooth module, you have to use two Bluetooth modules and Arduino. One at the Transmitter and the other at the receiver end. Then using serial communication (TTL interface) you have to transmit the switch state or a value from the transmitter end to receiver end.
First code (Tx) : switch press to serial data
Second code (Rx) : serial to servo posistion.
Yes sir I know how to connect Bluetooth as master and slave to each other but I m totally capable to write a code of servo using 2 push button as transmitter and 1 servo as receiver portion can u give me code of TX and Rx of my application. As per yr code of 2 push button
Sorry I am NOT totally capable to write code of…………………..
Interface the arduino with hc-05 for bluetooth serial communication.
//Reading push switch while (digitalRead(2) == HIGH && pos < 180) { pos++; // write value of variable pos to serial Serial.write(pos); delay(15); } while (digitalRead(3) == HIGH && pos > 0) { pos--; Serial.write(pos); delay(15); }Sorry sir but I can’t understand in the code of TX because there are potentiometer and I want to add 2 push button instead of potentiometer. And in your code of Rx you put 1 push button and with the help of this push button control the led. That’s I don’t understand.
Now I just I request u is that please tell me wherever I will have to change in Code of TX and Rx as per my application. otherwise will you make the code of TX and Rx for me as per my application?
Application :
Servo rotate in CCW and CW using 2 push button (0-180___180-0). With the help of serial communication Bluetooth HC05.
Connect Tx and Rx of the HC-05 to the RX and Tx of the arduino respectively.
//HC 05 Bluetooth module Receiver code #include <Servo.h> Servo servo; int Position = 0; void setup() { //Attach servo control pin to arduino pin 9 servo.attach(9); Serial.begin(38400); } void loop() { if(Serial.available() > 0){ // Read position value. Position = Serial.read(); } // write values to servo servo.write(Position); delay(15); }//HC-05 Bluetooth module Transmitter code int Position = 0; void setup() { Serial.begin(38400); } void loop() { //connect push button to pin 2 while (digitalRead(2) == HIGH && Position < 180) { Position++; //send 0 to 180 Serial.write(Position); delay(15); } //connect push button to pin 3 while (digitalRead(3) == HIGH && Position > 0) { Position--; //send 180 to 0 Serial.write(Position); delay(15); } }OK thx sir
Hello sir, I have motor driver = L298N, l293d, and A4988 this 3 drivers which one is most easy to control the stepper motor using 2 push button. And how to use these selected driver. Can you please explain with the help of code.
Applications ;
And I also control stepper motor using 2 push button using Bluetooth HC05
Hello sir, i am totally new in programming a servo, i have a lilypad which i want to control 2 servos and push button as switch, i have make it to move bu using sweep code, but when change the angles it doea not do anything, after a few moves the servk stop and i hear a sound of servo still running and then servo feels hot,
I onky want to achieve that my servo goes to go up 90 degrees by pressing the button switch and back to 0 by pressing again the switch.
I really appreaciate all help i can get a coreect code. Thanks si much
Probably it can be due to gear damage or similar servo complaints. The heating is due to the excessive current drawn by the motors when it stuck.
Btw sir my servos are attached to pin 7 and 9, i alao intend to use 6 volts battery pack, i qas told that i need a separate skurce for the servos i want them to move at the same time same angle and back.
It is recommended to use the servo with a PWM pin. Also check the source voltage and servo rated voltage.
Can YOU make this code as per my application Rx and TX for me
Sir I req you.
Application:
Control the stepper using 2 push button using Bluetooth HC05
Just replace the servo driving code with the stepper code.
hello sir i make this code to contorl stepper motor using 2 pushbotton with help of l298n driver.
so i request i is that can you make this BELOW code for me into RX and TX for BLUETOOTH HC-05.
i hope you help me.
#include
int forward = 2;
int reverse = 3;
Stepper motor(200, 11,10,9,8);
void setup() {
pinMode(forward,INPUT);
pinMode(reverse,INPUT);
Serial.begin(9600);
}
void loop() {
int Speed = analogRead(A0);
int RPM = map(Speed, 0, 1023, 0, 500);
int f = digitalRead(forward);
int r = digitalRead(reverse);
if(f == 1 && r == 0 && RPM > 1)
{
motor.step(1);
motor.setSpeed(RPM);
delay(.01);
}
if(r == 1 && f== 0 && RPM > 1)
{
motor.step(-1);
motor.setSpeed(RPM);
delay(.01);
}
delay(5);
Serial.println(RPM);
}
I think this is the code you are expecting.
//Receiver code #include <Stepper.h> Stepper motor(200, 11, 10, 9, 8); void setup() { Serial.begin(38400); } void loop() { while (Serial.available() > 0) { int pos = Serial.parseInt(); int RPM = Serial.parseInt(); } motor.step(pos); motor.setSpeed(RPM); delay(10); } //Transmitter code int forward = 2; int reverse = 3; void setup() { pinMode(forward, INPUT); pinMode(reverse, INPUT); Serial.begin(38400); } void loop() { int Speed = analogRead(A0); int RPM = map(Speed, 0, 1023, 0, 500); int f = digitalRead(forward); int r = digitalRead(reverse); if (f == 1 && r == 0 && RPM > 1) { Serial.print(1); Serial.print(","); Serial.println(RPM); delay(10); } if (r == 1 && f == 0 && RPM > 1) { Serial.print(-1); Serial.print(","); Serial.println(RPM); delay(10); } delay(5); Serial.println(RPM); }OK thx sir if you don’t mind can u please give me mail I’d or contact number
admin@mechatrofice.com
hello sir my name is ronak rathod .
i mail you to solve my query. i request you please check out your mail and help me .
Hello I want to make servo move from 90 to 140 if first button is pressed and come back to 90 if second button is pressed and it should move from 90 to 40 if third button is pressed and again if second button is pressed it should go back to 90. I want connection and code. Pls HELLLLPPPPPP. HHHHHEEEEELLLLLLLPPPPPP
You mean to sweep you servo to these positions or just directly to 40,90,140 degree positions.
Sir please please sir help me. ‘ગ’ word write by mistake at the and of code.
Got any error message?
No sir but signal not approach at the receiver portion. And in the transmitter portion only show the value of ‘A0’ when I open serial monitor. There is no problems in the Bluetooth I checked perfectly.
I think you need to sort out the issue step by step.
Check the communication using the Bluetooth module by directly sending data. And make sure it is properly communicating.
Then step by step build the code by adding you sensor reading etc. Separately check each portion.
Hello sir can you you please help me? As per my above application or solve this problem
Hello sir can you you please help me? To solve my this problem
how is the code different on an arduino mega 2560? thanks!!!
No difference, the same code works with Arduino mega 2560.
Hello sir I want to control 2 servo motor using 4 push button, each servo control by 2 push button. It means 1st servo control by 2 push button and 2nd servo control by other 2 push button. This all system is control by Bluetooth HC05 then I request u plz help me
This code was u gave me before months ago. Then can u plz give me code as per my above application.
//HC 05 Bluetooth module Receiver code
#include
Servo servo;
int Position = 0;
void setup() {
//Attach servo control pin to arduino pin 9
servo.attach(9);
Serial.begin(38400);
}
void loop() {
if(Serial.available() > 0){
// Read position value.
Position = Serial.read();
}
// write values to servo
servo.write(Position);
delay(15);
}
//HC-05 Bluetooth module Transmitter code
int Position = 0;
void setup() {
Serial.begin(38400);
}
void loop() {
//connect push button to pin 2
while (digitalRead(2) == HIGH && Position < 180) {
Position++;
//send 0 to 180
Serial.write(Position);
delay(15);
Hallo admin, can youbplease help me.
I have project rfid servo door lock, please help cooding for it.
If i touch the rfid, servo will going from 0 to 90 but it will stay in ther, and if touch the rfid again, servo will going from 90 to 0.
I need your support please
For controlling a servo with RFID you need to modify the code given above to check whether the RFID code given is correct, instead of checking the state of the digital input to drive the servo. Do you have the remaining code for reading and verifying UID?
Hello sir I want to control 2 servo motor using 4 pushbutton each servo motor is controlled by 2 pushbutton with the help of HC-05 BLUETOOTH module. Sir can u please help to make a code
Refer the page to attach multiple servos, arduino serial servo control.
How do I add 2 LED’S to the circuit . All I have is a 1k ohm resistor and my Servo makes a humming noise sometimes. When I make Servo go clockwise LED turn red on. Then when press button 2 counterclockwise and turn green LED on.
Use this code,
//Declare Pin 4 & 5 as output, in void setup. while (digitalRead(2) == HIGH && pos < 180) { // Red LED to pin 4 digitalWrite(4, HIGH); // RED ON ... ... } digitalWrite(4, LOW); // RED OFF while (digitalRead(3) == HIGH && pos > 0) { // Green LED to pin 5 digitalWrite(5, HIGH); //Green ON ... ... } digitalWrite(5, LOW); //Green OFFI have the code I. How do I add 2 LED’S to the circuit . All I have is a 1k ohm resistor and my Servo makes a humming noise sometimes. When I make Servo go clockwise LED turn red on. Then when press button 2 counterclockwise and turn green LED on?
As two LEDs are not ON at a time, you can use either one of the circuits.
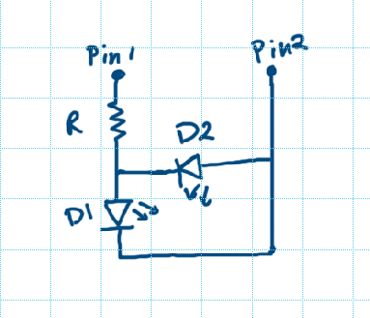
The servo buzzing can be due to positioning error or any mechanical issues.
l’m new
I still cannot get it to work can you make a whole new diagram like the one above
like the original one
can i use 2 push buttons which have 2 pins under to connect to the breadboard? if can, how do i connect it?
Yes u can. How do you connect, means?
HELLO,
i am using micro servo motor 9g A0090 and i need to modify it to turn 360 so i removed the knob inside the servo and it is rotating 360.but the problem is the servo is rotating continuously with out stop.i need angle control with push button .plz help me to solve this
The feedback system in the servo is for 180 degrees. So, you cant operate a 360 degree angle control with that.
Hi! Do you know what should I do if I need to use a DC motor?
You mean, control the direction of a DC motor.
Refer : DC motor direction control.
hi guys,,i want controll mq5 sensor with butoon,or bluetooth, does anyone know the program?
Hi, I have try to edit a code to work with two servos by one button attached to a servo and only one is working correct. Can someone write my code correctly? while (digitalRead(2) == HIGH && pos1 0) {
pos1–;
servo.write(pos1);
delay(15);
can we control ones input as aswitch of servo motor with help of arduino; use ones output to control servo motor.
can we control servo motor clockwise and anti-clock wise with a single pulse with help of arduino.
Did you mean to rotate the servo clockwise and counterclockwise with alternate pulses?
That is, the servo moves in one direction when the switch is pressed first and moves opposite when pressed again.
Hi, i have some trouble how to properly send signal from buttons by nrf24L01 module. Which code must be on transmitter, which on receiver? Can u help me ?
digitalRead at TX part and servo write at the RX part.
From the transmitter, you have to generate corresponding messages for the inputs and read the message at the receiver for servo write.
Hello, I am new to Arduino and coding and I would like to control my servo with one push button. With one push I would like it to sweep from 0 to 180 degrees and stop there and then with a second push I would like it to sweep back from 180 to 0. I have been playing around with code and cannot seem to figure out how to exactly do this. Any input would be extremely helpful, thank you very much!
Try this code. The servo sweeps between 0 and 180 degrees (0 → 180 | 180 → 0) for alternate switch press.
//you have to add, int state = 0, Loadstate = 0; const int Switch = 2; //Inside void loop if (state == 0 && digitalRead(Switch) == HIGH) { state = 1; //Load state toggles between high and low for each switch press Loadstate = !Loadstate; } if (state == 1 && digitalRead(Switch) == LOW) { state = 0; } if (Loadstate == HIGH) { //Sweep from 0 to 180, when first push set Loadstate = HIGH. for (pos = 0; pos <= 180; pos += 1) { myservo.write(pos); delay(15); } else { //Sweep from 180 to 0, when second push set Loadstate = LOW. for (pos = 180; pos >= 0; pos -= 1) { myservo.write(pos); delay(15); }Hi, thanks for the input! I still seem to be having trouble with the servo control, it is not switch activated at all now and just sweeping when using this code, even though I am declaring the switch and appropriate pin. Any idea why this is doing that?
Can you share the full code you are using?
Also, are you sure you have a properly connected pull-down resistor?
quien me puede ayudar con un programa en arduino me urgue es controlar un servo con 4 pus boton con el primero me tiene quedar a 45° y con el 4 boton regresar a cero, y con el boton 2 me de 90° y con el 4to boton regresar a 0, y con el 3 boton mandar a 180° y con el 4to boton regrece a cero me urgue dejo mi email y podemos apoyarnos. tiene que ser antes del 16 agosto 2019. ferpab_80@hotmail.com
Try this,
if (digitalRead(1) == HIGH ) { servo.write(45); } if (digitalRead(2) == HIGH ) { servo.write(90); } if (digitalRead(3) == HIGH ) { servo.write(180); } if (digitalRead(4) == HIGH ) { servo.write(0); }Sir, do this code work as:
when pb1 is pressed the servo (i am using continuous servo) moves till the button remains pressed upto 180 and when pb2 is pressed servo rotates back till button is pressed upto 0, and in case the button is released earlier then the rotation stops at same time
Actually the position of the continuous servo is not determined by the input as like a standard servo motor; no end position in either direction. You can only control the speed and direction of rotation.
Refer comments http://mechatrofice.com/arduino/servo-motor-push-button-control#comment-515
Use this code to rotate a continuous servo clockwise and counterclockwise with switch press.
if (digitalRead(p1) == HIGH) { // when switch p1 is pressed rotates clockwise at full speed. servo.writeMicroseconds(1000); } else( // rotation stops when released servo.writeMicroseconds(1500); } if (digitalRead(p2) == HIGH) { // when switch p2 is pressed rotates counter clockwise at full speed. servo.writeMicroseconds(2000); } else( // rotation stops when released servo.writeMicroseconds(1500); // rotation stops }Hey admin,
You seem like the most helpful Arduino pro on the internet. Maybe you could help me also?!
I’m very new to Arduino. I’m looking for help with coding and wiring. I have an Arduino Uno, an MG995 servo, three momentary push button switches, a bunch of different resistors, and a separate power supply for the servo.
When I press button 1, I would like the servo to rotate clockwise from 0 degrees to 45 degrees, stay there for 30 seconds, then rotate counter-clockwise from 45 degrees to 0 degrees (return to the original position).
When I press and hold button 2, I would like the servo to rotate clockwise from 0 degrees to 45 degrees and stay there until I release button 2. When I release button 2, the servo should to the original position.
When I press button 3 at any time (during the 30 second interval mentioned above), I would like the servo to return to the original position.
I will also need a proper wiring diagram that would accompany the above sketch… please.
Add this code inside the void loop. For the circuit just refer the sketch given in the main content. You just need to add one more switch as same as switch 1 & 2 (one terminal of the switch to +Vcc and the other to arduino pin with a pull down resistor which is connected across the arduino pin and GND) and connect to the pin 4 of the arduino.
/*Switch 1 - connected to Arduino pin 2. Switch 2 - connected to pin 3. Switch 3 - connect to pin 4.*/ if (digitalRead(2) == HIGH) { // Once you press the switch 1 the servo write to 45 deg. servo.write(45); int T2 = millis(); while (millis() - T2 <= 30000 && digitalRead(4) != HIGH) { // Loop repeats for 30 seconds unless switch 3 is pressed. } // if switch 3 is pressed, while loop exits and servo write to 0 deg. servo.write(0); } // when switch 2 is pressed servo write to 45. if (digitalRead(3) == HIGH) { servo.write(45); } // Servo write to 0 only when switch 2 is released. else { servo.write(0); }The code is not tested with a circuit. You just try and if any error occurs, please let us know; ll helps you.
my project is a rfid card controled servo thAT will be came at the first position after 5 sec and the same servo can controled with push button for forward and backward PLEASE HELP ME AMIGO
You mean to turn the servo to 0 when RFID is detected and after 5 seconds the servo control switches to switch input. Right.
Sir can you help me.
I have 2 servo with 3 push button with different rotate.
Servo1 rotate 0 to 60 and back 60 to 0 with interval per degree and repeat automatically (have push button on off)
Servo 2 rotate 0 to 60 if push button 1 clicked, and if push button click again will back 60 to 0.
Pls help me how to make that script
Hi, I am looking for some code to do this four button and one servo
servo starts at 0 deg from start
Press button 2 servo goes to position 90 deg
Press button 3 servo goes to position 180 deg
Press button 3 servo goes to position 270 deg
Press button 1 servo goes to position 0 deg
pressing button 1 will reset the position to 0 deg
or pressing button 1 – 2 – 3 – 4 will take up the assigned deg
It must not go over centre, say from 270 deg straight to 0 deg but travel the same track, the reason for this is the servos are rotating a small platform, the platform has wires attached to it, so, if it did the wires would get twisted up around the centre.
I will be using a 270 deg servo for this.
I do know that to get the degrees i need i will have to change the code to get the rotational positions of the servo
can any one help please
Mike
I think your concern is about the servo continues the same direction of rotation from 0 to 270 and to 0, which makes a full rotation on each time and makes your wires keep twisted. But a 270-degree servo never rotates after 270 it stops at the maximum angle and for any angle value below that, it rotates in the reverse direction.
Hi, yes I found that out.. I have muddled through code an have something that works, I do need some one to scan though it and tidy it up s bit. The other thing that is needed is LEDs to indicate the button press ie what position the servo is and button pressed these remain on untill a new position is taken up
Mike
you can add “digital write” off and on along with the servo write, to turn on and off LEDs with the corresponding buttons.
Hi, I have made the code for 4 buttons and one servo, seems to work, I still need help on the LEDs so I can see the angle position the servo it is at, so at 90deg led is on, 180 led is on and so on
Just add “digitalWrite(pin,HIGH);” at each “if” condition for input switch.
Example for 90 deg,
if (digitalRead(2) == HIGH) {
digitalWrite(6,HIGH); //Connect LED of 90deg to pin 6
digitalWrite(pin,LOW); //Add this line for every other pins to turn off.
….
….
servo.write(90);
}
Hi, I’m very new to arduino’s and coding, but I was just wondering if you could help me. I’m trying to get a servo to go from 0 to 45 degrees when I push a button then back to 0 when I release it. Is there a way to do this?
Use the below code inside the void loop,
// simply the servo arm rotates to 45 degrees when the button is pressed.
if (digitalRead(2) == HIGH) {
servo.write(45);
delay(50);
}
// Whenever it is released its goes to 0 degree.
else{
servo.write(0);
delay(50);
}
What would the void setup be?
#include <Servo.h>
void setup() {
pinMode(2, INPUT);
servo.attach(9);
}
void loop() {
……….
……….
}
Hello Sir.
Can you write me a code for for two buttons Function.
When i press a button 1 it goes from 0 to 65 degrees and returns to 0 in full speed end stops for two seconds. That repeats all the time when Button 1 ist pressed.
when i press Button 2 (Taster) and releas goes from 0 to 65 degrees and returns to 0 in full speed. It waits there till next time is Button 2 Pressed.
void loop() {
if (digitalRead(2) == HIGH) { // Button 1
servo.write(65);
delay(50);
servo.write(0);
delay(2000); // 2 Second delay
}
if (digitalRead(3) == HIGH) { // Button 2
servo.write(65);
delay(50);
servo.write(0);
} }
Thank you wery much for Replay.
I have tried and what the Problem is that the sequens starts imidietly without pressing any Buttons.
What do i have to enter that Action taks only when Button is Pressed els no movment.
And by Button 2 i have to releas Button to go back to position 0. I want when i Press and releas that goes from 0 to 65 and back to 0 and wait till next Button is Pressed.
Thx in advance…
You mean,
When pressed switch 1, 0 -> 65 -> 0 and 2s delay, then repeats.
When pressed switch 2, 0 -> 65. When released switch 2, 65 -> 0 else remain at 65.
void loop() {
if (digitalRead(2) == HIGH) { // Button 1
servo.write(65);
delay(50);
servo.write(0);
delay(2000); // 2 Second delay
}
if (digitalRead(3) == HIGH) { // Button 2
servo.write(65);
delay(50);
} else {
servo.write(0);
delay(50);
}
}
If the sequence is starting immediately without pressing any Buttons, then you must check whether you have properly conencted the pull down resitors and declared pin 2 and 3 as inputs.
Hi there! First of all thank you for all of your support. I am trying do build a puzzle with 5 servos and 5 push buttons where:
Button A – Press one time – Servo A moves to 20
Button A – Press second time – Servo A moves to 90
Button A – Press third time – Servo A moves to 150
Button A – Press fourth time – Servo A moves back to initial position 0.
—–
Button B – Press one time – Servo A & Servo B moves to 20
Button B – Press second time – Servo A & Servo B moves to 90
Button B – Press third time – Servo A & Servo B moves to 150
Button B – Press fourth time – Servo A & Servo B moves back to initial position 0.
——-
Button C – Press one time – Servo A & Servo B & Servo C moves to 20
Button C – Press second time – Servo A & Servo B & Servo C moves to 90
Button C – Press third time – Servo A & Servo B & Servo C moves to 150
Button C – Press fourth time – Servo A & Servo B & Servo C moves back to initial position 0.
—-
Button D – Press one time – Servo A & Servo B & Servo C & Servo D moves to 20
Button D – Press second time – Servo A & Servo B & Servo C & Servo D moves to 90
Button D – Press third time – Servo A & Servo B & Servo C & Servo D moves to 150
Button D – Press fourth time – Servo A & Servo B & Servo C & Servo D moves back to initial position 0.
—
I have can only make the first section where Button A & Servo A works accordingly, but as soon as I add Part B the nothing happens.
Can you please help me with that? thank you so much!!!
Could you share the code or algorith you have upto this part B?
Hi, I am trying to make a servo go clockwise with the push of a button and counterclockwise with the push of another button. Do you think that you can help me with the circuit and code?
Dear could you please Do a lesson about watch dog time and sleep mode in Arduino.
Yes, ll do it soon.
Create a system for speed control of a Servo Motor using two buttons. Whenever the
first button is pressed the speed should increase gradually and speed should reduce
on the second button. The second button will have a higher priority if both are
pressed. Find the percentage error and accuracy.
sir,
I need 4 servos (5v) running , so which is better Arduino uno or Arduino nano.
will I need extra module for driving the servos.
I also need the code for running 2 of the servos from 0 to 80 degree followed by the other 2 to go 0 to 45 degree when I press a push button and then when I press the button again I need the second set of servos to return to 0 degree followed by the first set. can u help me ?
Uno and nano have almost the same specifications both run with atmega328p, for your project it doesn’t make any difference.
You can drive 4 servos using uno or nano alone, but you have to (5V)power the servos externally since you have 4 servos.
In your program, what exact movements you are required? just move the separate set in order on alternate switch press or when keep holding the switch? do they have a specific difference in time between the two sets? (could you detail the algorithm)
How can i change the program to press once the buton and tourn 45 drees? for each side
if(digitalRead(2) == HIGH) {
servo.write(45);
}
else if(digitalRead(3) == HIGH) {
servo.write(0); }
Have a Gold life my friend. I am work with a project , you are help for too many people, its great.
I have 2 button , servo and lm35. Fırst ı want a degree for temp then servo work for hım bring it temp for mu degree.
Are you have idea for this ?
Could you explain this further?
There is hot and cold water interference, I have 2 different channels and valves, like the valve. I want to use the output degree, I want to change the servo degree for the water degrees. I guess I should use pid control. But I can’t use the pid code. Can you help me
You mean, you have to control the valves of hot and cold water to obtain the required water temperature?
Yes exactly. Are you have any idea ?
How do you need to control that?
By manual switch pressing to turn the servo position. Or automatically for an input temperature value?
Do you have 2 separate servos for two valves?
Hello, I’d love some help if you don’t mind. You seem very knowledgable with this stuff and I’m a beginner lol
So I’m trying to make a spinning pencil holder that’s controlled by 2 buttons, one for left one for right. If you press one, the stepper motor with spin a certain amount to reveal a pencil. I want it to only spin that amount in that direction each time, but I can’t find any code for it!! I have an Arduino Uno with the stepper motor already on its own circuit board. Any chance you have either schematics or code for making this work?
I also may not have described this the best way, so if you need more detail let me know lol, I’m not great with words.
Could you detail it here – http://mechatrofice.com/forum/ask-question
I’ve read through all of the comments and have been trying to figure out this code, but have only gotten it to work with one servo. And was wondering if you could help me out.
My goal is to have two servos controlled by one button. Both servos start at 0° then when the button is pressed both servos turn to 90° simultaneously and when pressed simultaneously go back to 0°. Any help is greatly appreciated!
Thank you!!!
Refer: multiple servo attachments at, http://mechatrofice.com/arduino/servo-motor
The same variable(num) with a degree value can be used for multiple servos; servo1 & servo2.
servo1.write(num);
servo2.write(num);
Hey is there a way that I could use this code, but replace the push buttons with hand sensors?
Yes of course you can replace it with any input. But code and the circuit are completely dependent on the sensor and its operation.
hi admin, i would be so grateful if you could help me with this problem, im trying to use a servo with 2 pushbuttons, one for going up and another for going down, pushing the UP button only once and the servo going up 90 degrees, then if pushed again, going to 180 degrees. Then if the downbutton is pushed the servo moves from 180 to 90, and if pushed again from 90 to 0. Being 0 degrees the min and 180 the max. Kind of simulating a type of elevator but not at small increments,instead going straight from one angle to another. Thanks in advance!
Try this code, the code checks the state of the buttons, and when a button is pressed, it increases or decreases the servoPosition variable accordingly and moves the servo to the desired angle.
if (upButtonState == LOW) {
delay(50); // Debounce the button
if (digitalRead(upButtonPin) == LOW) {
// Increase the servo position
servoPosition += 90;
if (servoPosition > 180) {
servoPosition = 180;
}
elevatorServo.write(servoPosition);
delay(200); // Delay for button release
}
}
// Check if the DOWN button is pressed
if (downButtonState == LOW) {
delay(50); // Debounce the button
if (digitalRead(downButtonPin) == LOW) {
// Decrease the servo position
servoPosition -= 90;
if (servoPosition < 0) { servoPosition = 0; } elevatorServo.write(servoPosition); delay(200); // Delay for button release } }